Most of them are outdated, but provide historical design context.
They are not user documentation and should not be treated as such.
Documentation is available here.
Serial Execution of Asynchronous Tasks Detailed Design
Summary
Currently, oVirt Engine has an ability to run an asynchronous task on the SPM. When the task completes, AsyncTaskManager re-creates the command and calls its endAction(), which is pivoted to endSuccessfully() or endWithFailure(), depending on the result of the SPM task. This feature aims to extend this behaviour to allow an engine command to fire a series of asynchronous SPM tasks in order to allow complex flows (e.g., Live Storage Migration, proper error handling in Move Disk) to be implemented.
Owner
- Name: Allon Mureinik
- Email: amureini@redhat.com
Current status
- Released in oVirt 3.1
- Deprecated in oVirt 4.0, replaced by Command Coordination (CoCo)
- Removed completely in oVirt 4.1
Detailed Description
This feature will break the coupling where an engine command equals an SPM task. It will allow the engine to manage complicated asynchronous flows, possibly across several hosts.
Entity Description
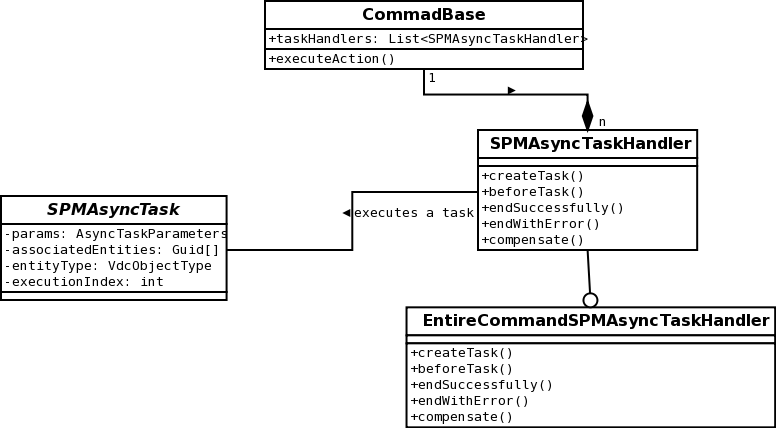
SPMAsyncTask
A new property, executionIndex (int) will be added, to signify the position of this task in a command’s flow.
SPMAsyncTaskHandler
This new entity will represent how oVirt engine handles a single SPMAsyncTask, instead of how it’s handled by CommandBase today. Its methods:
beforeTask- the execution carried out on the engine side before firing an async task. This is analogous the today’sexecuteAction()body, and includes updating BEs and persisting them in the database.createTask- how to create the async taskendSuccessfully- the code to run when a task ends successfullyendWithFailure- the code to run when a task ends unsuccessfullycompensate- the code to run if a completed task needs to be undone - see below.
CommandBase
CommandBase will hold a List<SPMAsyncTaskHandler> to manage executing of SPMAsyncTasks. Basically, execute() will iterate over the handlers and execute each. See details below.
EntireCommandSPMAsyncTaskHandler
This is a dummy class to mimic the old behavior of command base under the new design. It holds a reference to the wrapping CommandBase object and implementa SPMAsyncTaskHandler as follows:
beforeTask- callsCommandBase.executeAction()createTask- returnsnull- is handled in thebeforeTask()endSuccessfully- callsCommandBase.endSuccessfully()endWithFailure- callsCommandBase.endWithFailure()compensate- empty, implemented inendWithFailure()
CRUD
SPMAsyncTask’s CRUD operations should consider the new property. Other objects do not have interesting CRUD operations.
User work-flows
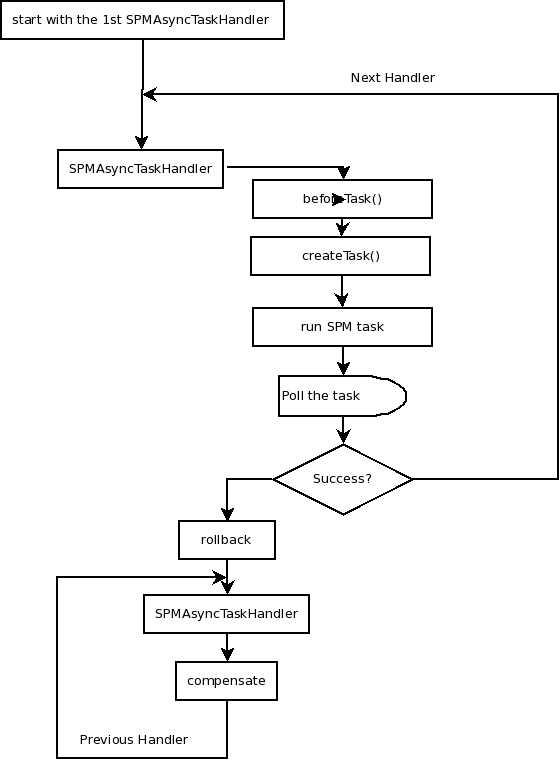
Flow chart
DFD
Successful Execution
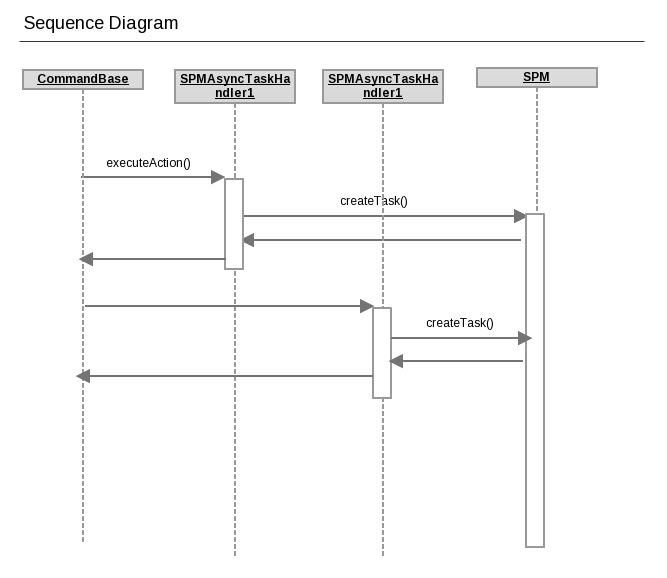
Instead of calling executeCommand(), CommandBase will iterate over its SPMAsyncTaskHandlers and execute them. The default EntireCommandSPMAsyncTaskHandler will simply call the command’s executeAction() for backwards compatibility. For each one, CommandBase calls beforeTask(), and then fires an SPM command according to createTask(). When the command ends, AsyncTaskManager wakes up the handler, and it runs endSuccessfully(). CommandBase then starts the process over again with the next handler.
Note: the treatment of HSM commands remains synchronous, as has no bearing on this proposed feature’s design.
Unsuccessful Execution
See the execution flow above. When an SPM task fails, the relevant handler is awoken, and it calls endWithFailure(). CommandBase then iterates in a reverse order, and calls each handler’s compensate().
Events
JBoss Restart/Crash
When JBoss starts, task polling is restarted (as before this change). The only change is that now tasks are now persisted with their executionIndex, so when a tasks completes the command issuing it can be resumed from the correct place.
Dependencies / Related Features and Projects
Live Storage Migration depends on this feature. This feature will also allow for better error handling in various Move Disk scenarios.